A Passive Mechanism For Relocating Payloads With A QuadrotorJoseph DeGol, David Hanley, Navid Aghasadeghi, Tim Bretl2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS '15) |
|||||||
|
|
ABSTRACT |
||
|---|---|---|
|
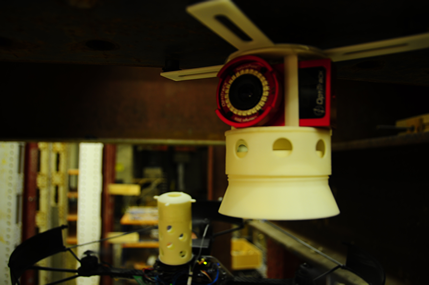
We present a passive mechanism for quadrotor vehicles and other hover-capable aerial robots based on the use of a cam-follower mechanism. This mechanism has two mating parts, one attached to the quadrotor and the other attached to a payload. These two parts are joined by a toggle switch --- push to connect, push to disconnect --- that is easy to activate with the quadrotor by varying thrust. We discuss the design parameters and provide an inertial model for our mechanism. With hardware experiments, we demonstrate the use of this passive mechanism to autonomously place a wireless camera in several different locations on the underside of a steel beam. Our mechanism is open source and can be easily fabricated with a 3D printer. |
VIDEO |
||||||
|---|---|---|---|---|---|---|
|
Here is a video that describes the mechanism and demonstrates its functionality and its application for relocating cameras (and other small payloads) using a quadrotor UAV. A Link to download the video is also provided.
|
MODELS |
||||
|---|---|---|---|---|
|
This section provides the 3D models for printing the mechanism. See the paper and videos for information on how the pieces fit together.
|
BIBTEX |
||
|---|---|---|
@inproceedings{DeGol:IROS:15,
author = {Joseph DeGol and David Hanley and Navid Aghasadeghi and Tim Bretl},
title = {A Passive Mechanism for Relocating Payloads with a Quadrotor},
booktitle = {IROS},
year = {2015}
}
|