A Clustering Approach For Detecting Moving Objects Captured By A Moving Aerial VehicleJoseph DeGol, Myra Nam2014 IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP '14) |
|||||||
|
|
ABSTRACT |
||
|---|---|---|
|
We propose a novel approach to motion detection in scenes captured from a camera onboard an aerial vehicle. In particular, we are interested in detecting small objects such as cars or people that move slowly and independently in the scene. Slow motion detection in an aerial video is challenging because it is difficult to differentiate object motion from camera motion. We adopt an unsupervised learning approach that requires a grouping step to define slow object motion. The grouping is done by building a graph of edges connecting dense feature keypoints. Then, we use camera motion constraints over a window of adjacent frames to compute a weight for each edge and automatically prune away dissimilar edges. This leaves us with groupings of similarly moving feature points in the space, which we cluster and differentiate as moving objects and background. With a focus on surveillance from a moving aerial platform, we test our algorithm on the challenging VIRAT aerial data set and provide qualitative and quantitative results that demonstrate the effectiveness of our detection approach. |
VIDEOS |
|||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
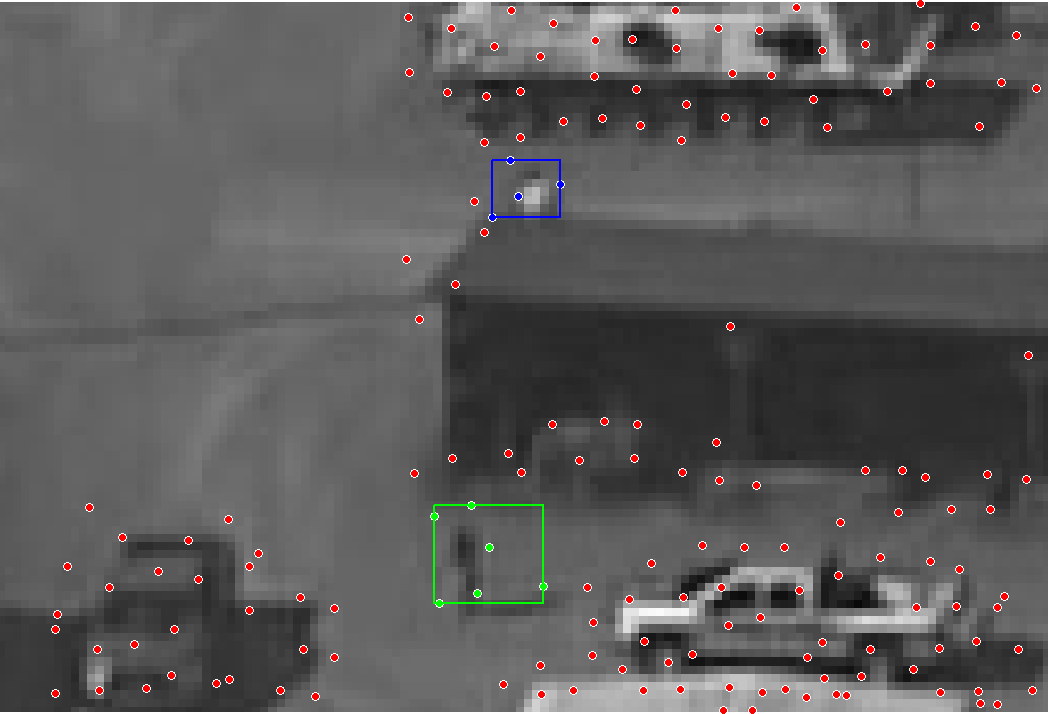
Here are three videos that demonstrate the successes and failures of the tracking approach on segments of the VIRAT aerial dataset. The tracked points are being displayed and share the same color if they are part of the same cluster. The bounding box that is estimated from the tracked cluster is also shown. Links to download the videos are also provided.
|
BIBTEX |
||
|---|---|---|
@inproceedings{DeGol:ICASSP:14,
author = {Joseph DeGol and Myra Nam},
title = {A Clustering Approach for Detecting Moving Objects Captured by a Moving Aerial Camera},
booktitle = {ICASSP},
year = {2014}
}
|